Environment
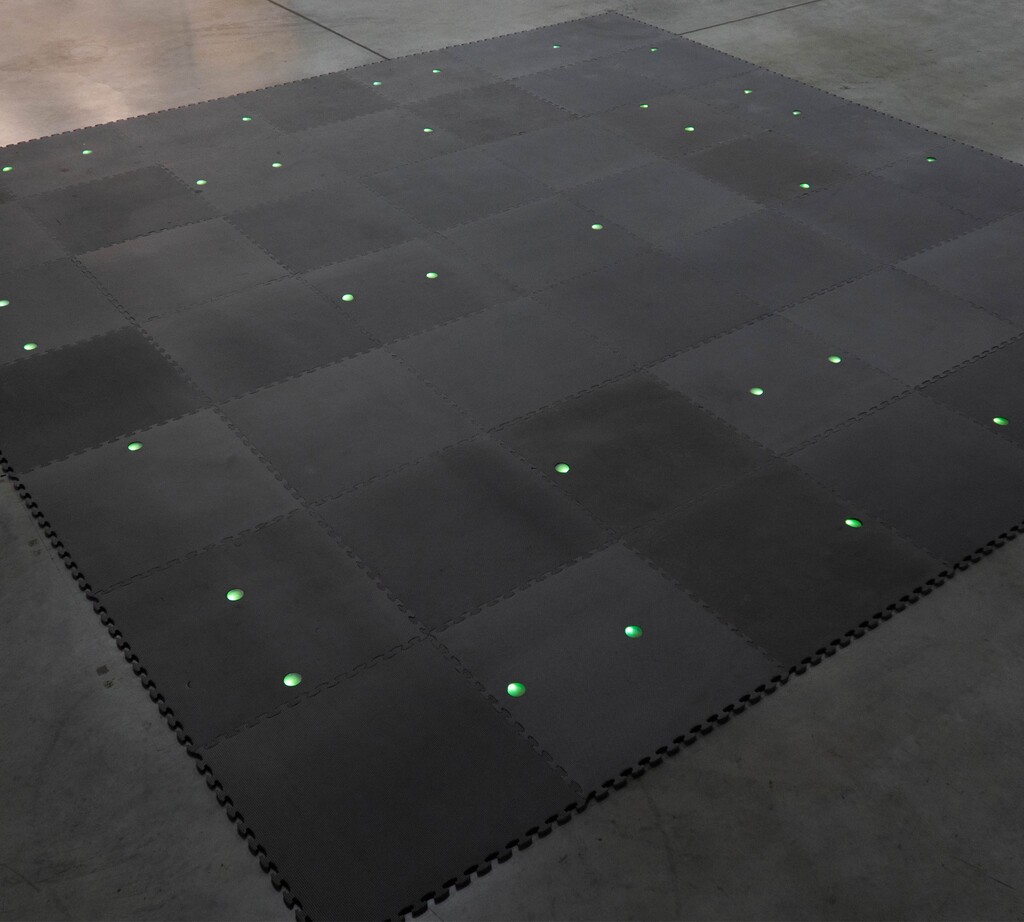
Environment是跟踪区的红外标记布置图,跟踪器通过该标记确定其在空间中的位置。
Environment结构
Environment由红外标记组成。所有标记的性质、发射频率和波长都是相同的,并且在红外范围内不断发光。它们没有任何特定的ID。
为了便于使用,红外标记可以分组为称为基准杆(
reference bar)的基本模式。跟踪器处理Environment的算法
跟踪器根据红外标记位置的独特组合(即特征/
feature)确定其位置。当您第一次打开它或在失去位置后(例如,用手关闭镜头后),跟踪器会尝试从其视野中的标记中检测特征。然后,在确定位置后,跟踪器会看到标记并将其与Environment进行比较。如果标记的位置与该布局匹配,则跟踪器继续处理红外标记;如果不匹配,则启动特征搜索过程。
Environment参数
每个Environment都有2个关键参数:
- 特征质量:显示特征分布的均匀性。特征的质量越高,跟踪器打开后确定其位置的速度越快;
- 跟踪质量:显示红外标记分布的均匀性。红外标记的位置越均匀,跟踪系统就越稳定和准确。
Э这些参数本质上是相反的。通过均匀放置红外标记,可以实现最大的跟踪质量。同时,没有考虑其位置(特征)的局部唯一性。同样,达到特征的最大质量会降低跟踪质量,因为它会重新组合红外标记,而不管其分布是否均匀。
因此,在设置Environment参数时,需要努力在跟踪质量和特征质量之间取得平衡。
Environment类型
有三种类型的Environment:
- 在Arbitrary2D Environment中,标记也位于同一水平面上,但与HorizontalGrid Environment不同的是,它们位于坐标网络中,任意且相互独立。
- 在Vertical Environment中,标记位于垂直表面或我们的特殊垂直结构(
pillars)中。
除了Arbitrary2D Environment之外,还有一种创建您自己的Environment的替代方法。在这种情况下,用户不仅可以任意放置红外标记,还可以创建自己的标记搜索算法(
matching):有关更多信息,请参阅我们在Github上的项目。