Alt
光学惯性跟踪模块体积小。通过此模块,您可以跟踪物体的位置。
在本文中
- 一般信息
Alt是一个用于6DoF位置跟踪(六自由度位置跟踪)的小型轻量级模块。该跟踪器能够以亚毫米精度和低延迟确定其在空间中的位置。
在某些情况下,跟踪器无法检测到标记,例如,当用户在游戏期间意外地覆盖了光学传感器一小段时间。这不会导致跟踪失败,因为系统可以仅使用惯性数据继续跟踪。
AltAlt不仅可以即时接收当前定位数据,还可以对其进行外推,即预测被跟踪对象未来的位置。这允许您补偿渲染延迟。
跟踪物体
Alt可以跟踪各种物体:用户身体部位、器具、相机。
使用Alt卡子将Alt固定在底座上。Alt卡子是一种锁定设备,旨在确保Alt和底座之间的可靠连接。

Alt卡子帮助您避免由于主动移动或意外受外力影响,而导致底座和Alt之间的完全或短期丢失连接。这样可以避免丢失跟踪数据。
设备之间的持续连接提供了不间断的跟踪数据传输。因此,您将收到全部数据。
Alt卡子帮助您避免由于主动移动或意外受外力影响,而导致底座和Alt之间的完全或短期丢失连接。这样可以避免丢失跟踪数据。
要固定Alt卡子,您需要: 单击下面的Download(下载)按钮,下载Alt Bracket 3D模型
单击下面的Download(下载)按钮,下载Alt Bracket 3D模型
- 将Alt Bracket放在Alt下,使其固定设备的三面;
- 用M2x4 DIN 912螺丝固定卡子(使用安装孔)。
单击下面的Download(下载)按钮,下载Alt Bracket 3D模型与VR耳机兼容
Alt与各种底座结合使用,可用于各种VR设备,尤其是大多数VR耳机。
要共享,您需要在AntilatencyService中配置头盔(或其他VR设备)上跟踪器的Placement(位置)。您可以选择大多数HMD可用的默认位置,也可以自定义位置。
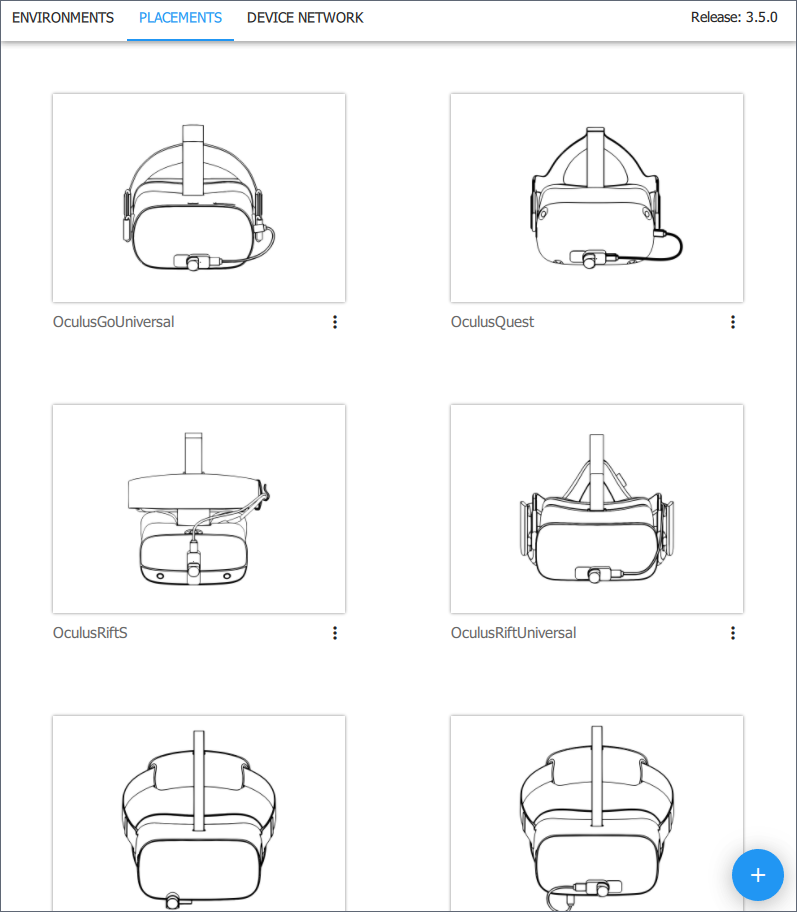
我们为一些设备开发了专门的解决方案,如Pico Native Socket。
Antilatency跟踪可以与VR耳机自己的跟踪系统集成。为此,使用Antilatency Tracking Alignment Library。
跟踪可靠性
跟踪系统需要检测至少一个唯一的光学模式,以确定跟踪器的位置并开始跟踪运动对象。
例如,由于用户在游戏期间标记的重叠,有时无法从光学传感器检测到模式。在这种情况下,跟踪操作不会出现故障,因为系统能够通过惯性传感器确定跟踪器的位置。
惯性数据提供足够的跟踪时间,以便从光学传感器获取新图像并恢复光学跟踪。
跟踪器传感器
Alt光学惯性模块的结构包括:
将所有传感器组合在一个设备中可确保其同步。
低更新延迟
从传感器获取数据的频率不同:
- 光学传感器以每秒
60帧的速度在全帧传输数据。使用ROI(region of interest/感兴趣区域)技术,帧速率可以提高到每秒400帧。 - 从加速度计和陀螺仪获取数据的频率约为每秒
2000次测量。
在组合数据流中,记录从传感器接收数据的准确时间戳。
在光学传感器中,拍摄一帧并进行处理需要一定的时间,这取决于曝光时间。在前一帧处理和新光学数据出现之间的时间间隔内,对惯性传感器进行了约30次测量。
这将数据更新时间减少到
2毫秒。组合数据流
Alt跟踪器使用传感器融合(sensor fusion)方法形成合并数据流。该流程通过合并来自传感器的数据形成:惯性数据作为基础,在下次光学测量到达时进行校正。
由于这种校正,惯性跟踪中固有的噪声不会累积。校正不是针对每次光学数据更新单独进行的,而是考虑到以前的测量结果进行的。换句话说,对一定数量的历史数据进行平滑处理,其中新的观察结果比旧的更具权重。
为了调整状态,使用
getState方法,其中历史数据采样的时间间隔作为参数传递。此值的默认值是DefaultAngularVelocityAvgTime常数。因此,跟踪数据一方面由于惯性测量而具有低延迟,另一方面由于来自光学传感器的信息而具有高精度。
数据外推
组合跟踪数据流不仅可以包含当前定位数据,还可以预测(外推)被跟踪物体的位置、方向和运动参数。数据外推允许您补偿渲染过程中不可避免发生的延迟。
getExtrapolatedState方法用于获取外推状态。应该记住,外推的时间间隔越长,其结果越不准确。因此,我们建议外推时间不超过1秒。
数据预处理
从光学传感器传输整个图像需要跟踪器和主设备之间的高带宽,并引入额外的延迟。
为了将延迟降到最低,光学传感器的图像直接在Alt中处理。在图像上找到的标记的计算坐标和大小将传输到主设备。
这种数据预处理减少了主设备和通信信道上的负载。
这种方法显著降低了跟踪数据后续处理的计算复杂性。这还降低了跟踪器存储设备的内存需求。
定制光学元件
光学传感器通过具有
230度广角视角的专用透镜接收信息。良好的标记可见性可确保稳定和准确的跟踪。处理Alt时要小心,因为玻璃上的小划痕和碎片可能会导致传感器的可见度下降。
透镜视角方案:

坐标系统
Alt坐标系如下:
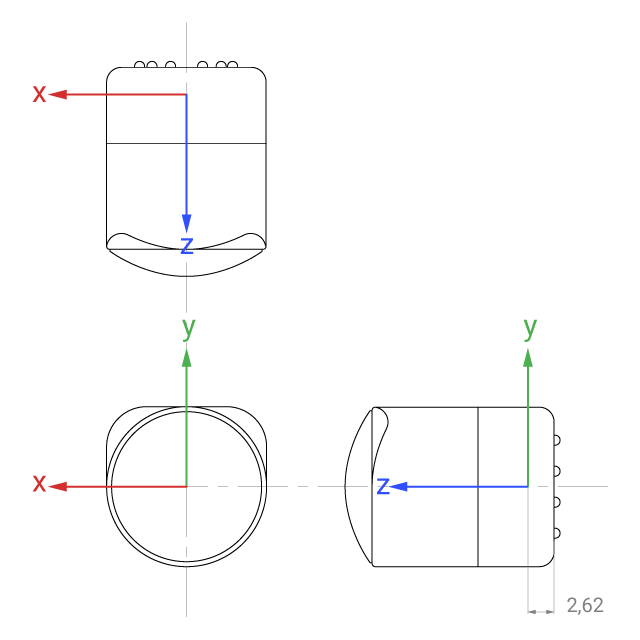
注意原点的位置,它相对于跟踪器的背面有一个偏移。有关更多详细信息,请参阅Placement。
技术规格
光学传感器、加速度计、陀螺仪 | |
跟踪数据更新率 | 光学传感器:60-400 fps 惯性传感器:2000 Hz |
2 ms | |
视角 | 230° |
耗电量 | 跟踪模式:175 mA / 3 V \n 待机模式:130 mA / 3 V |
通信接口 | 通过Socket传递数据 |
工作温度 | +5°C ~ +50°C |
湿度 | ≤75%(+25°C) |
尺寸 | 16 × 16 × 21 mm |
重量 | 10.5 g |
3D模型
单击下面的
Download(下载)按钮,下载Alt 3D模型LED指示
当Alt连接到电源时,LED显示其当前状态。
正常状态:
| 指示 | 描述 |
|---|---|
Loading(加载)——Alt通电或重新启动时的第一种状态,外围设备正在初始化并应用设置。 | |
Idle(空闲)——等待任务(Task)。 | |
装入程序状态
在固件更新期间,或者如果固件丢失或损坏,Alt将进入装入程序模式。
| 指示 | 描述 |
|---|---|
Normal(正常)——装入程序已准备就绪。 |
有关Alt跟踪器的其他指示(处于错误状态),请阅读此处:错误的LED指示.
其他软件属性
您可以为Alt跟踪器添加和配置其他软件属性。使用这些属性,您可以更改摄像机曝光或将LED临时设置为任意颜色。有关详细信息,请参阅“Alt:附加属性”。