Что нового в релизе 4.
В релизе 4.1.0 используется новая библиотека Pillars. Теперь вертикальная зона трекинга обладает дополнительными параметрами и возможностью игнорировать «лишние» референс-бары.
Режим строгого соответствия выбранному Environment
В новой версии библиотеки
Antilatency.Alt.Environment.Pillars можно выбирать один из двух алгоритмов поиска маркеров. Различаются два варианта: в зону видимости попадает строго текущая зона трекинга, или трекеру могут быть видны лишние референс-бары. За строгость алгоритма поиска маркеров отвечает параметр Strict match.Если режим Strict match включён, то трекер ожидает строгого соответствия между видимыми референс-барами и их положением в Environment. Этот режим идеально подходит для одной зоны трекинга. Однако это строгое ограничение блокирует трекинг, если Alt «видит» референс-бар, отсутствующий в Environment. Режим строгого соответствия (Strict match) всегда включён в предыдущих версиях библиотеки
Pillars.Отключение режима Strict match обеспечивает работу трекинга при наличии референс-баров (столбов, планок), не относящихся к текущей зоне трекинга. Следует учитывать, что режим нестрогого соответствия менее надёжен, и есть риск неправильного определения местоположения трекера. Режим Strict match нужно отключать в следующих случаях:
- две вертикальные зоны трекинга, в частности зоны Pillars, расположены рядом;
- в помещении есть крупные отражающие поверхности (например, глянцевая плитка, стеклянная или зеркальная стена), в которых отражаются референс-бары.
Режим строгого соответствия (
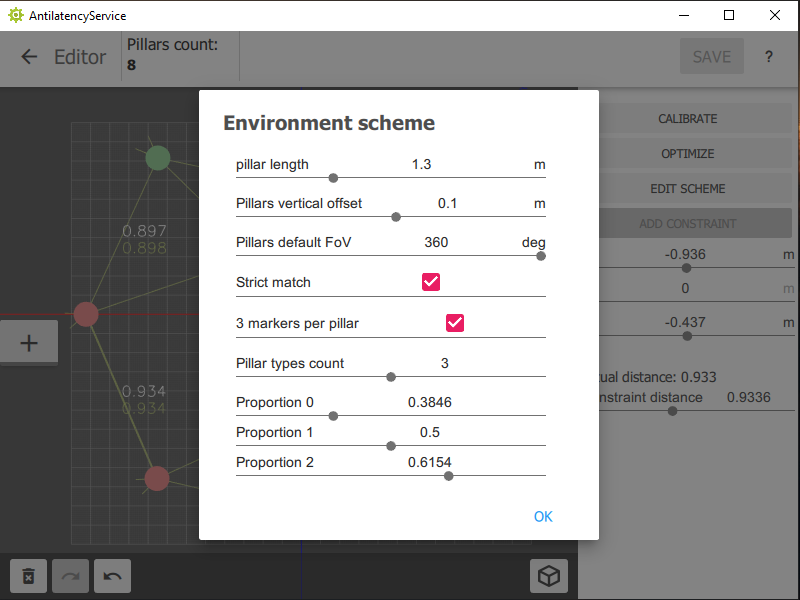
Strict match) можно включить и выключить в параметрах схемы Environment в приложении AntilatencyService.Расстояние до пола
Теперь для всех рефернес-баров можно задать высоту нижнего ИК-маркера над уровнем пола. В AntilatencyService этот параметр называется
Pillars vertical offset, и по умолчанию он равен 0.114 м. Задав этот параметр, вы всё так же можете смещать каждый рефернес-бар по вертикали на произвольную высоту.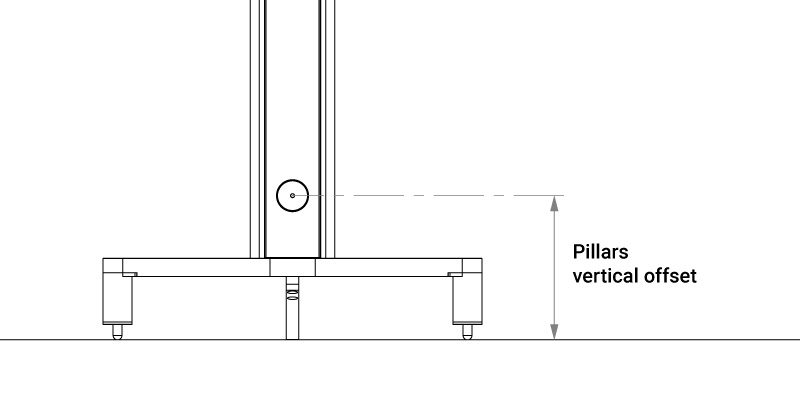
Подробнее про систему координат в редакторе Environment можно посмотреть здесь.
Угол видимости маркеров по умолчанию
Теперь угол видимости маркеров можно задать сразу всем референс-барам вертикальной зоны трекинга, а не по-отдельности каждому. В AntilatencyService параметр называется
Pillars default FoV и применяется только при создании нового Environment. Если вы редактируете уже существующий Environment, то задать угол видимости маркеров можно только по-отдельности для каждого референс-бара.
Если вы используете угол видимости, отличный от 360°, не забудьте задать направление референс-барам (выделить референс-бар, зажать Ctrl и мышью потянуть в нужную сторону). Подробнее – в этом разделе.
Параметры схемы в AntilatencyService и совместимость с предыдущими версиями
Все перечисленные новые параметры доступны для настройки в AntilatencyService 4.1.0 при создании нового вертикального Environment и при редактировании уже существующего (в редакторе Environment нажать на кнопку EDIT SCHEME в правой части окна).
Pillars Environment, созданные в предыдущих версиях AntilatencyService, работают и в версии 4.1.0, им можно задать новые параметры вертикальной зоны трекинга. Однако Pillars Environment, созданные в AntilatencyService 4.1.0, нельзя открыть в предыдущих версиях AntilatencyService и в приложениях, использующих предыдущие версии Antilatency SDK.
Обновление 4.1.1
- Исправление совместимости с Unreal Engine и Android
Исправлена проблема совместимости, новая версия SDK теперь работает в Unreal Engine. Кроме того, исправлена работа на Android >30, и билд для Android в UE >5.1. - Исправление работы библиотеки Tracking Alignment
Теперь библиотека Tracking Alignment корректно работает в Unreal Engine.