Placement
Дополнительная трансформация, применяемая к данным трекинга, которая зависит от положения модуля Alt относительно опорной точки физического объекта, на котором он установлен.
Любой объект в виртуальном мире имеет опорную точку (иначе,
pivot point), которая задаёт положение объекта в пространстве и угол его поворота. К примеру, у шлемов виртуальной реальности (HMD) эта точка находится между глазами пользователя.При установке трекера Alt на физический объект опорная точка трекера может не совпасть с опорной точкой объекта в виртуальном мире.
Далее в статье:
- опорная точка шлема виртуальной реальности
- опорная точка модели оружия
- нодальная точка камеры
- опорная точка трекера Alt
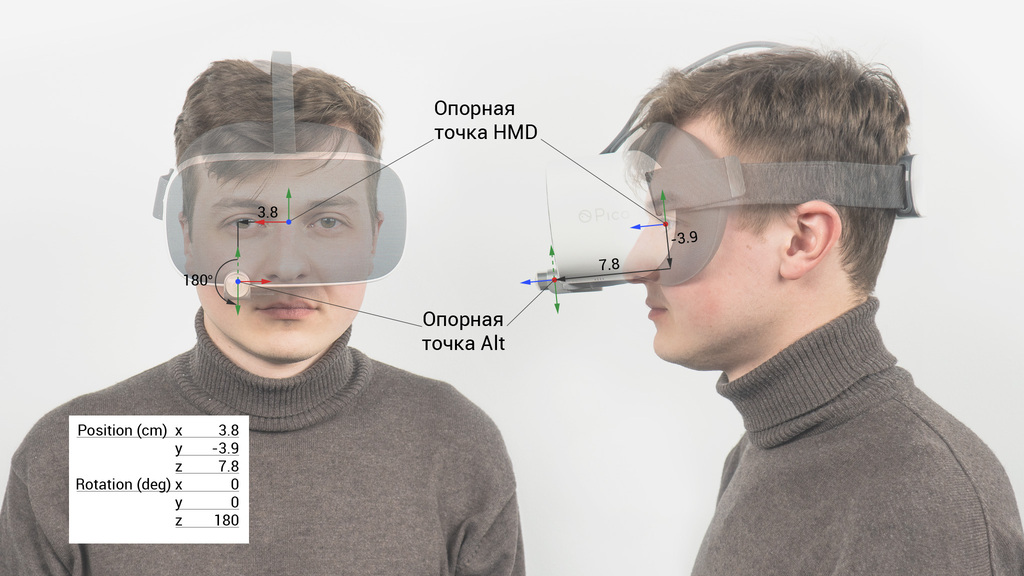
Опорная точка шлема виртуальной реальности
В случае с HMD важно правильно задать смещение и поворот опорной точки Alt в соответствии с физическим расположением трекера относительно точки между глазами пользователя.
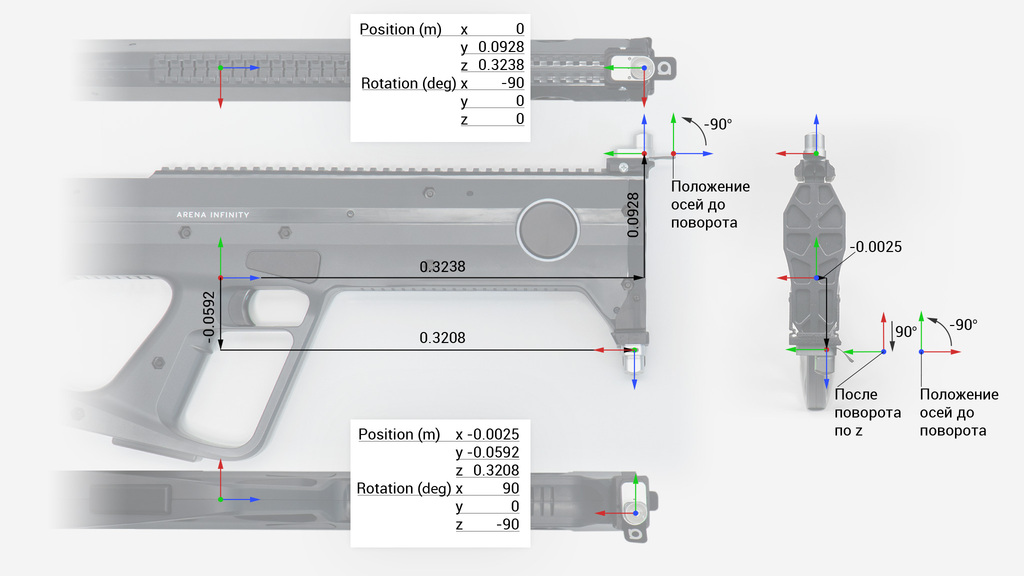
Опорная точка модели оружия
У модели оружия опорная точка может располагаться в районе рукояти. Тогда Placement будет трансформировать данные трекинга в соответствии со смещением и поворотом Alt относительно опорной точки на рукояти оружия.
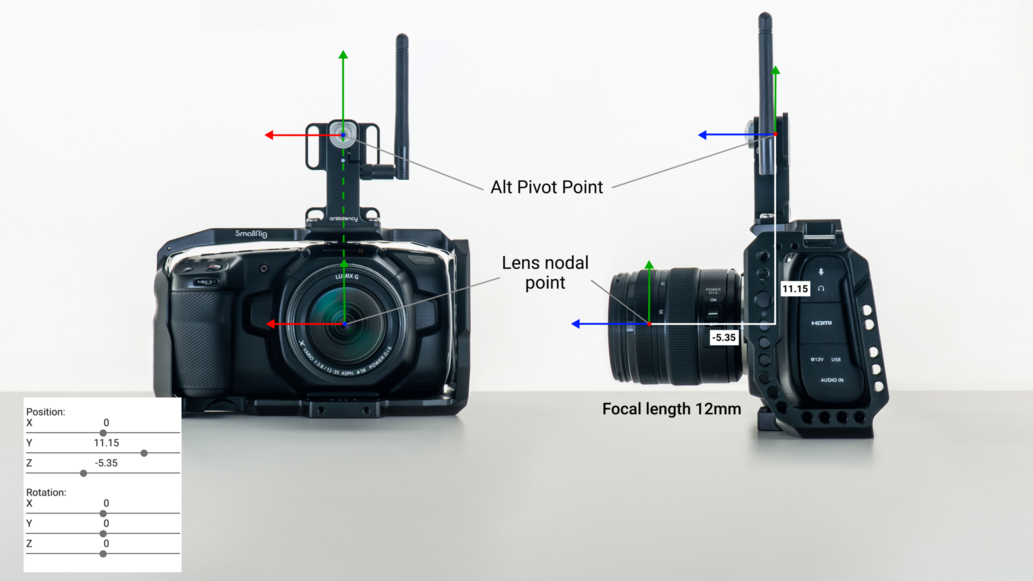
Нодальная точка камеры
Нодальная точка камеры совпадает с оптическим центром объектива. Способы нахождения этой точки описаны в статье 1, статье 2 и в видео YouTube.
Чтобы добиться идеального эффекта параллакса на зум-объективе, вам необходимо создать Placement для основного фокусного расстояния в AntilatencyService, а затем выполнить калибровку для разных фокусных расстояний в Aximmetry или Unreal.

Чтобы прикрепить сокет к камере, выберите удобное место на корпусе камеры (camera body). При выборе места расположения сокета с Alt:
- Alt-трекер должен быть направлен в сторону ИК-разметки зоны трекинга Antilatency;
- убедитесь, что Alt и сокет не попадают в кадр;
- и что элементы камеры, в свою очередь, не будут значительно перекрывать обзор трекеру;
- постарайтесь расположить центр трекера вдоль одной из осей X, Y или Z относительно опорной точки камеры (оптического центра объектива), чтобы упростить измерения расстояний;
- по-возможности трекер должен быть повёрнут в положение, где у него максимальный угол обзора.
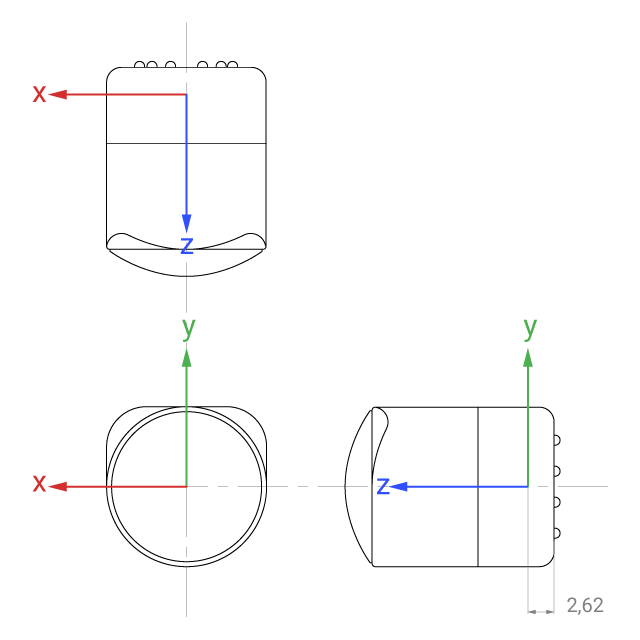
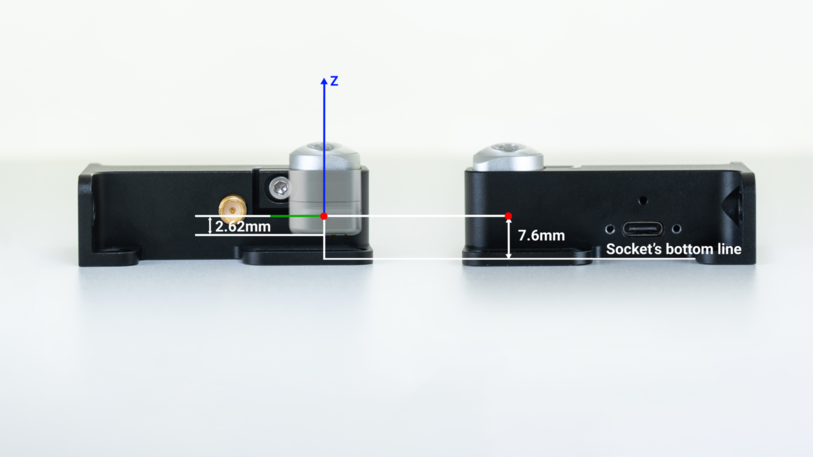
Опорная точка трекера Alt
Обратите внимание, что опорная точка трекера находится в 2.62 мм от его задней стенки.
Расстояние между опорной точкой Alt и задней стенкой сокета составляет 7.6 мм.
Создать или настроить Placement можно во вкладке Placements приложения AntilatencyService или непосредственно из пользовательского приложения.