如何将Antilatency与EZtrack一起用于虚拟生产

本手册旨在解释如何将Antilatency跟踪系统连接到EZtrack,以创建用于虚拟生产的实时增强现实。
要将Antilatency跟踪系统连接到EZtrack,请执行以下操作:
将Antilatency跟踪器安在摄像机上
我们建议将Antilatency跟踪器安在双杆夹具上。这些配件可以在任何摄像机手柄零售商处找到。然后将底座放在夹具的中心,并将其粘在现有的双面胶带上,如下图所示。
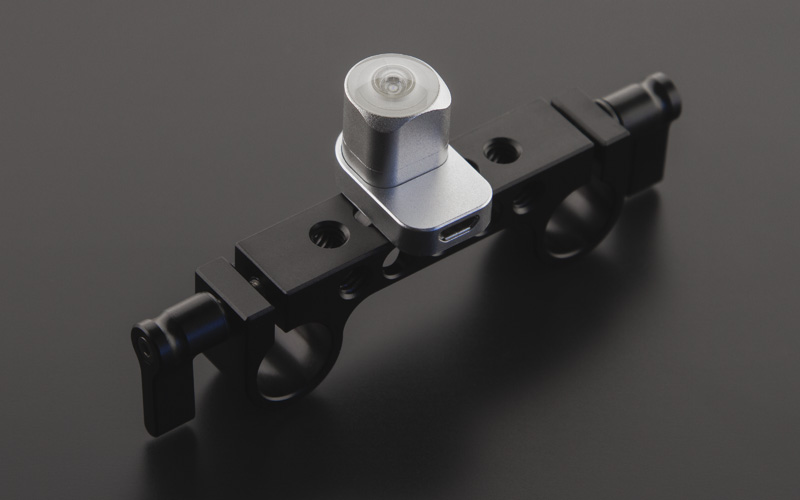
安在双杆夹具上的Alt跟踪器
将Alt安在夹具上后,可以将夹具安在摄像机主体,例如镜头下。这个Placement(位置)非常适合地板跟踪区。对于天花板跟踪区,最好将Alt设置在摄像机上方。要了解有关Placement的更多信息,请访问链接。

摄像机上的Alt
将Antilatency跟踪连接到EZtrack基线器
现在,您可以通过USB端口将Alt连接到EZtrack核心。
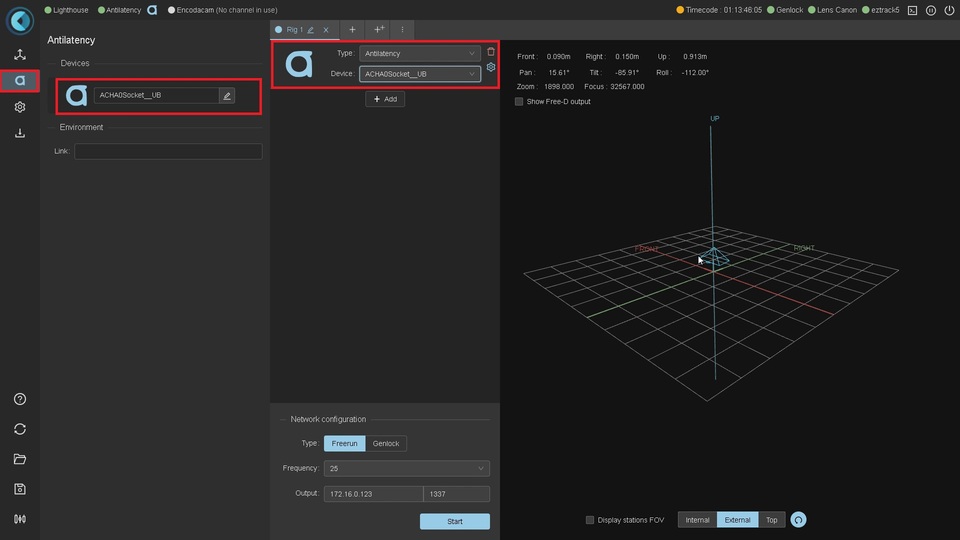
当Alt连接到EZtrack核心时,您将在EZtrack web应用的Antilatency菜单上看到跟踪器。之后,可以将跟踪器添加到装备。要创建新装备,请添加Antilatency节点并选择跟踪器。
设置Alt和摄像机传感器之间的偏移
Antilatency系统指示的三维位置由跟踪器的位置确定。要执行增强现实,需要将摄像机的三维位置加载到三维渲染引擎。因此,您必须将Alt跟踪器的位置与摄像机传感器的位置相匹配。
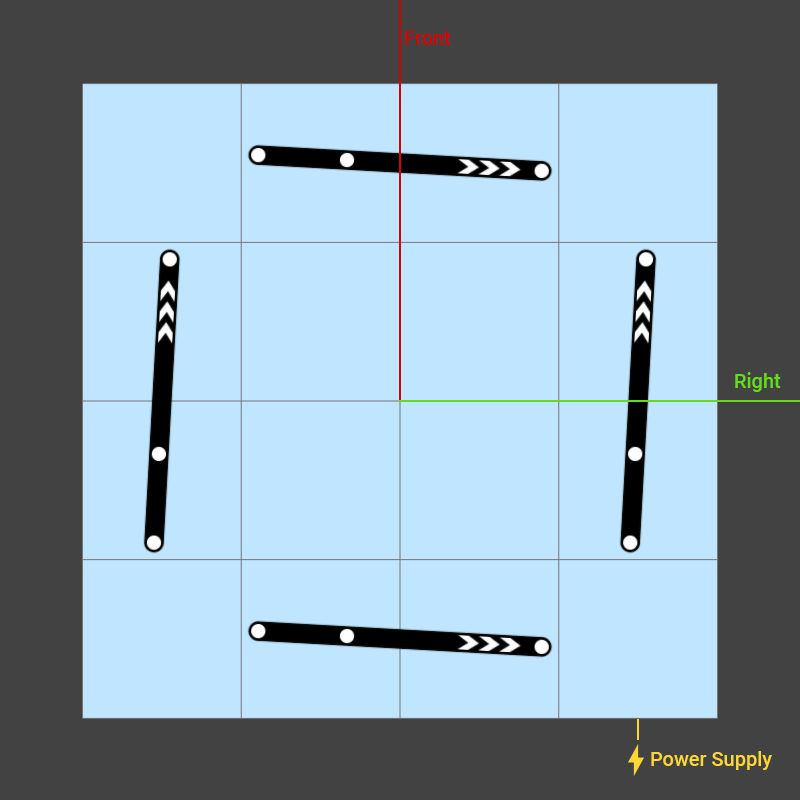
Environment的原点(旋转点)
默认情况下,EZtrack使用DevKit Environment。下图显示了Environment DevKit的坐标系图。在Environment编辑器中,图像的顶部与前进方向相对应。坐标原点位于图像的中心。您将收到相对于该点的跟踪坐标。
您还可以通过从web应用程序选项卡复制新链接来下载自定义Environment。您可以通过以下链接了解有关Environments的更多信息。
Alt跟踪器的原点(旋转点)
下图显示了跟踪器的原点。根据Alt跟踪器相对于摄像机的放置方式,必须将跟踪器的原点与摄像机的光学中心对齐。
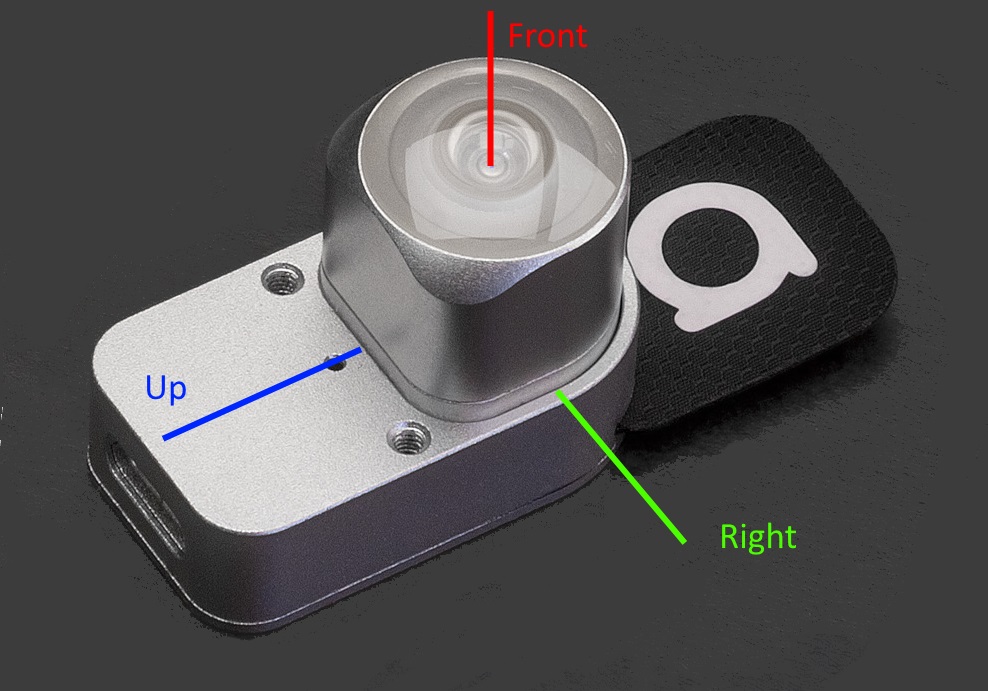
Alt跟踪器的坐标系
例如,根据我们当前的配置,我们添加了4个节点以匹配传感器的平面。
- 倾斜角度(tilt):+90°
- 转动角度(pan):+180°
- 水平偏移(front translation):-0.3 м
- 垂直偏移(up translation):+0.1 м
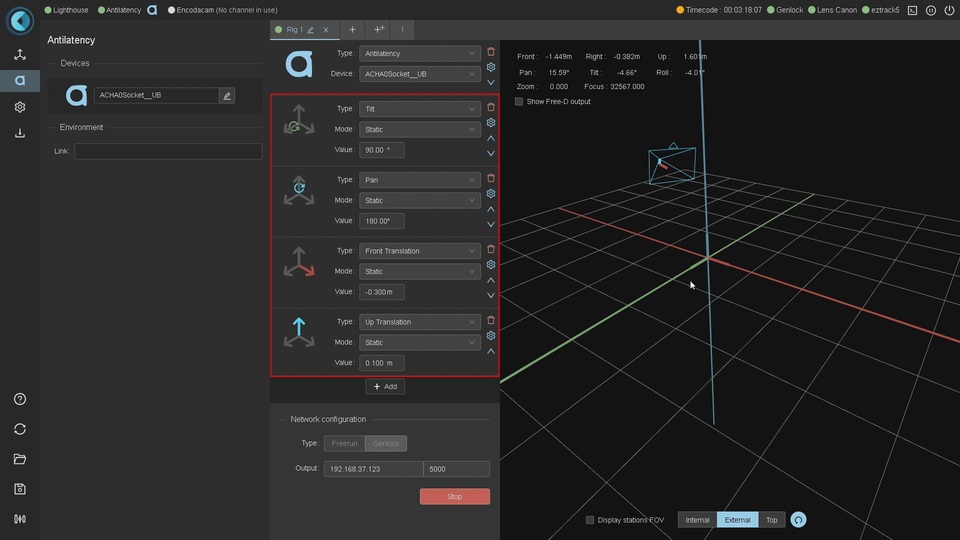
EZtrack偏移节点以匹配摄像机的光学中心
前两个节点用于对齐Alt跟踪器和摄像机的光学中心。最后2个节点仅补偿传感器的位置。

根据摄像机传感器偏移
通常,在虚拟生产中,我们将传感器移动到摄像机的平面上。稍后将节点偏移添加到渲染引擎侧的镜头文件中。
需要注意的是,您还可以直接使用Placements选项卡中的AntilatencyService设置此偏移量。
获取EZtrack镜头数据
有两种方法可以获取EZtrack镜头数据。一种方法是将EZtrack核心单元的专用电缆连接到您的镜头(Angenieux、Canon、Fujinon)进行广播。另一种方法是为没有内置驱动器的镜头使用外部机械编码器。
在专用EZtrack菜单中选择正确的镜头协议。它会自动将缩放和焦点数据添加到设置中。
将跟踪数据连接到渲染引擎
EZtrack通过UDP上的FreeD摄像机位置数据传输协议输出信息。这是一个非常常见的用于广播的摄像机跟踪协议。所有主要的虚拟生产引擎和越来越多的现代摄像机都支持此协议(ZeroDensity、Vizrt、Disguise等)。
要设置流数据,请设置渲染引擎的IP地址以及它们将发送到的端口号。
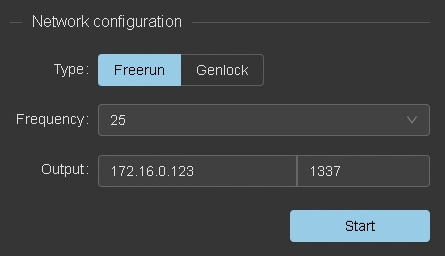
FreeD输出数据